MIT – Scientists develop crash-proof algorithm for drones
12. August 2021MIT – Scientists develop crash-proof algorithm for drones
New York, Aug. 12, 2021
In drone races, the winner is whoever flies the fastest – and doesn’t crash. Until now, crashes have been common because the faster drones fly, the more problems arise with aerodynmics.
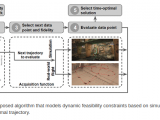
Now aerospace engineers at MIT have developed an algorithm that helps drones find the fastest way around obstacles without crashing. The new algorithm combines simulations of a drone flying through a virtual obstacle course with data from experiments with a real drone flying through the same course in a real space.
The researchers found that a drone trained with their algorithm flew through a simple obstacle course up to 20 percent faster than a drone trained with traditional planning algorithms. Interestingly, the new algorithm was not always able to keep a drone ahead of its competitor throughout the course. In some cases, it slowed the drone to negotiate a tricky turn or conserved energy to speed up and eventually overtake its rival.
„At high speeds, there are complicated aerodynamic relationships that are difficult to simulate. That’s why we use real-world experiments to fill in those black holes and figure out, for example, that it’s better to slow down first to speed up later,“ explains Ezra Tal, a doctoral student in MIT’s Department of Aeronautics and Astronautics. „It’s this holistic approach that we use to see how we can make a trajectory as fast as possible overall.“
„These kinds of algorithms are a very valuable step toward future drones that can navigate very quickly in complex environments,“ added Sertac Karaman, associate professor of aerospace engineering and director of MIT’s Laboratory for Information and Decision Systems. „We’re really hoping that we can push the boundaries so that they can move as fast as their physical limits allow.“
Tal, Karaman and MIT graduate student Gilhyun Ryou published their findings in the International Journal of Robotics Research.
https://journals.sagepub.com/eprint/SJZWUQV2SVJHURHTMSMZ/full