MIT: Roboterhand für die Kartoffelchips- Welt
3. Juni 2020MIT: Roboterhand für die Kartoffelchips- Welt
New York, 3.6.2020
Zwei neue Werkzeuge, die vom MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) gebaut wurden, können als Durchbruch auf dem Gebiet der Soft-Robotik eingereiht werdn: Roboter, die matschige, flexible Materialien anstelle der traditionellen starren Ausrüstung verwenden.
Diese Arten von Soft-Robotern lassen sind von lebenden Organismen inspiriert und bieten in ihrer vielseitigen Funktionalität zahlreiche Vorteile. Sie sind in der Lage, viel feinfühliger zu operieren als ihre starren Pendants. Bisher fehlte ihnen die Fähigkeit, wahrzunehmen, mit welchen Gegenständen sie interagieren. Das Problem wollten die MIT- Forscher lösen. Also statteten die Forscher ihre Roboter mit verschiedenen Sensoren, Kameras und Software aus, die es ihnen ermöglichen, eine Reihe von Objekten zu „sehen und zu klassifizieren“.
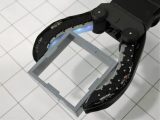
Weiche Roboterhände haben sensorisierte Häute, die es ihnen erlauben, eine Reihe von Objekten aufzunehmen, von empfindlichen, wie Kartoffelchips, bis zu schweren, wie Milchflaschen.
Der erste Roboter wurde 2019 in der Forschung am MIT und an der Harvard University gebaut, wo ein Team einen Robotergreifer in Form eines Kegels entwickelte. Er funktionierte, indem er ähnlich wie eine Venus-Fliegenfalle0zuklappte. Das Ergebnis waren eine Reihe von ungünstig geformten Objekten bis zum 100-fachen seines Gewichts aufnehmen konnten.
Durch das Hinzufügen taktiler Sensoren war der Roboter in der Lage, zu verstehen, was er aufnahm, und die Höhe des ausgeübten Drucks entsprechend anzupassen. Von den 10 im Experiment verwendeten Objekten konnten die Sensoren diese mit einer Genauigkeit von mehr als 90 Prozent identifizieren.
„Im Gegensatz zu vielen anderen weichen taktilen Sensoren können unsere schnell hergestellt und in Greifer nachgerüstet werden und zeigen Empfindlichkeit und Zuverlässigkeit“, sagte Josie Hughes vom MIT, die Hauptautorin eines Artikels über die Sensoren. „Wir hoffen, dass wir mit dieser Methode der weichen Abtastung , die für eine Vielzahl verschiedener Anwendungen in Fertigungsumgebungen, wie Verpacken und Heben, eingesetzt werden kann, erfolgreich sind , betonte Hughes.
Ein zweiter Roboter nutzte einen innovativen „GelFlex“-Finger, der einen sehnengesteuerten Mechanismus und eine Reihe von Sensoren verwendet, um „nuanciertere, menschenähnliche Sinne“ zu ermöglichen.
Das Team will nun die Abtastalgorithmen feiner abstimmen und komplexere Fingerkonfigurationen, wie z.B. Verdrehen, einzuführen.